

近日,复旦大学计算机科学技术学院颜波教授、谭伟敏青年研究员带领的数字媒体实验室团队在国际计算机视觉和模式识别顶级会议CVPR 2023 第三届反无人机挑战赛中取得第二名的成绩。本次比赛团队成员包括颜波教授、谭伟敏青年研究员以及博士生何瑞安、周诗力、程日和孙玉齐同学。团队成员将在6月份召开的CVPR 2023第三届反无人机研讨会上进行口头汇报和展示。

图1. 第三届反无人机第二赛道前三名的团队信息
无人驾驶飞行器,通常称为无人机,由于其灵活性、可承受性和普及性,在各种民用应用中变得越来越普遍。然而,随着无人机的日益普及,其对公共安全的潜在威胁也不容忽视。无人机已被用于进行物理和网络攻击,还可能违反航空安全法规,给航空公司造成中断和经济损失。在这方面,反无人机技术的发展成为一个至关重要的研究方向,对于国家安全,人民生命健康具有重大意义。
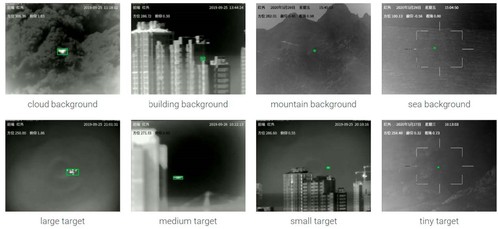
图2. 反无人机比赛中具有挑战性的样例
CVPR 2023第三届反无人机挑战赛是由北京理工大学、北京邮电大学、新加坡国立大学、阿姆斯特丹大学、中国科学院自动化所、中国人民解放军军事科学院、阿里达摩院等诸多机构学者共同发起。本届挑战赛重点针对复杂动态背景下的多种尺度的无人机目标,要求参赛模型对红外视频序列中的无人机进行准确、稳定、鲁棒地检测和跟踪。
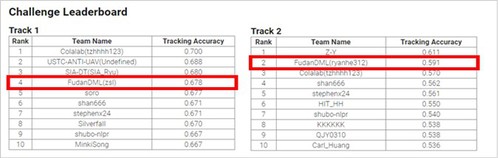
图3. 第三届反无人机比赛榜单
本届挑战赛共吸引了来自国内外的52支队伍参赛,经过一个多月的激烈角逐,由我院颜波教授和谭伟敏青年研究员带领的复旦大学数字媒体实验室团队,凭借提出的基于差异的多尺度无人机检测学习方法,在无人机检测及跟踪赛道(Track 2)取得了第二名的成绩,在无人机跟踪赛道(Track 1)取得了第四名的成绩。相关论文“Motion Matters: Difference-based Multi-scale Learning for Infrared UAV Detection”已被CVPRW 2023接收。
图4 相关论文被CVPRW2023接收
在论文中,团队提出了一种用于鲁棒无人机检测器的新型学习框架,称之为基于差异的多尺度学习 (DML)。考虑到基于单帧的识别率通常较低,而运动信息对于无人机的精确检测至关重要。为此,我们提出利用多个先前帧的帧差异,提取运动信息并阻止背景噪声。此外,方法还融合了多个时空尺度以进行训练和推理,从而实现多源信息的高效融合与互补。通过广泛的实验证明了所提方法可以提高基线模型的检测精度。
